











Multiway RCS

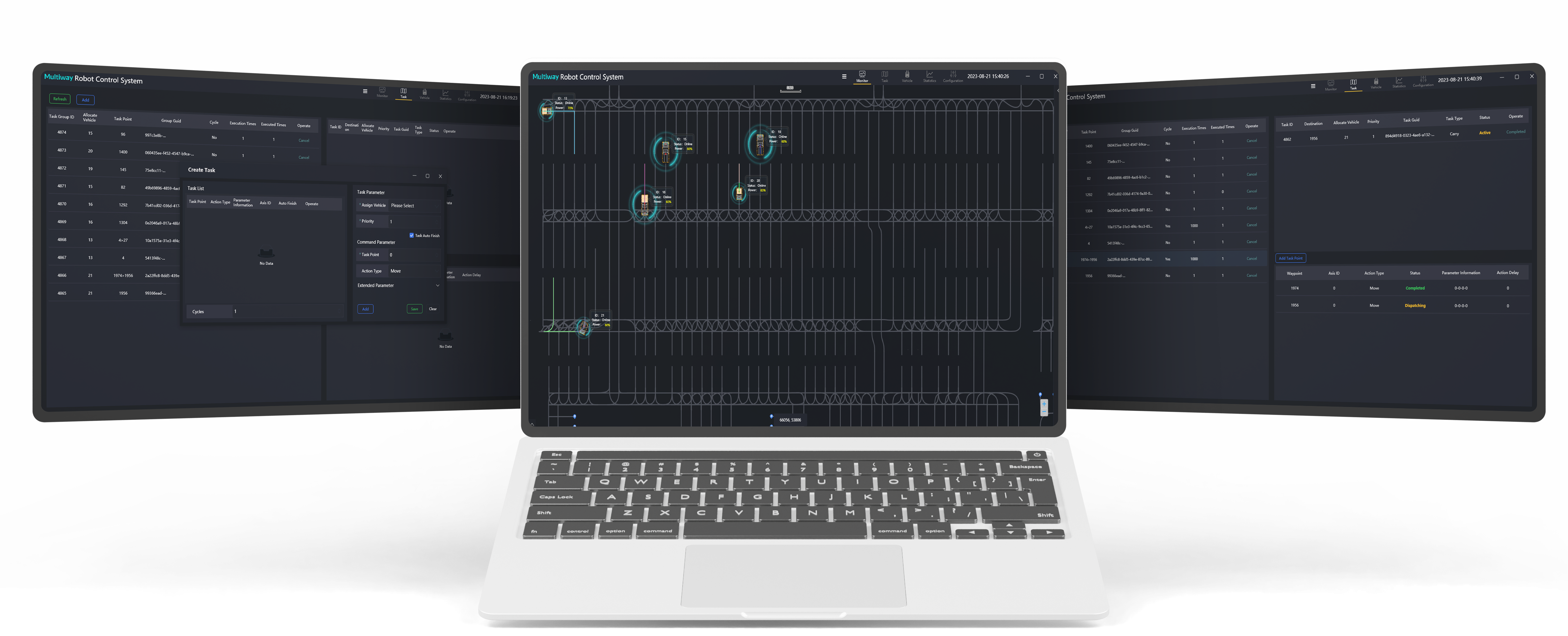
Das Multiway Robotersteuerungssystem (RCS) kann gleichzeitig den kollaborativen Betrieb von Hunderten Fahrzeugen verschiedener Modelle im selben Bereich unterstützen. Es plant schnell die optimalen Routen und ermöglicht eine ganzheitlich optimierte Navigationswegplanung, wodurch Aufgaben in kürzester Zeit abgeschlossen und die höchste Betriebseffizienz sichergestellt werden.
Integration von fahrerlosen Gabelstaplern, Vier-Wege-Shuttles und AMRs in ein gemeinsames Steuerungssystem

Kartierung der Umgebungsumgebung

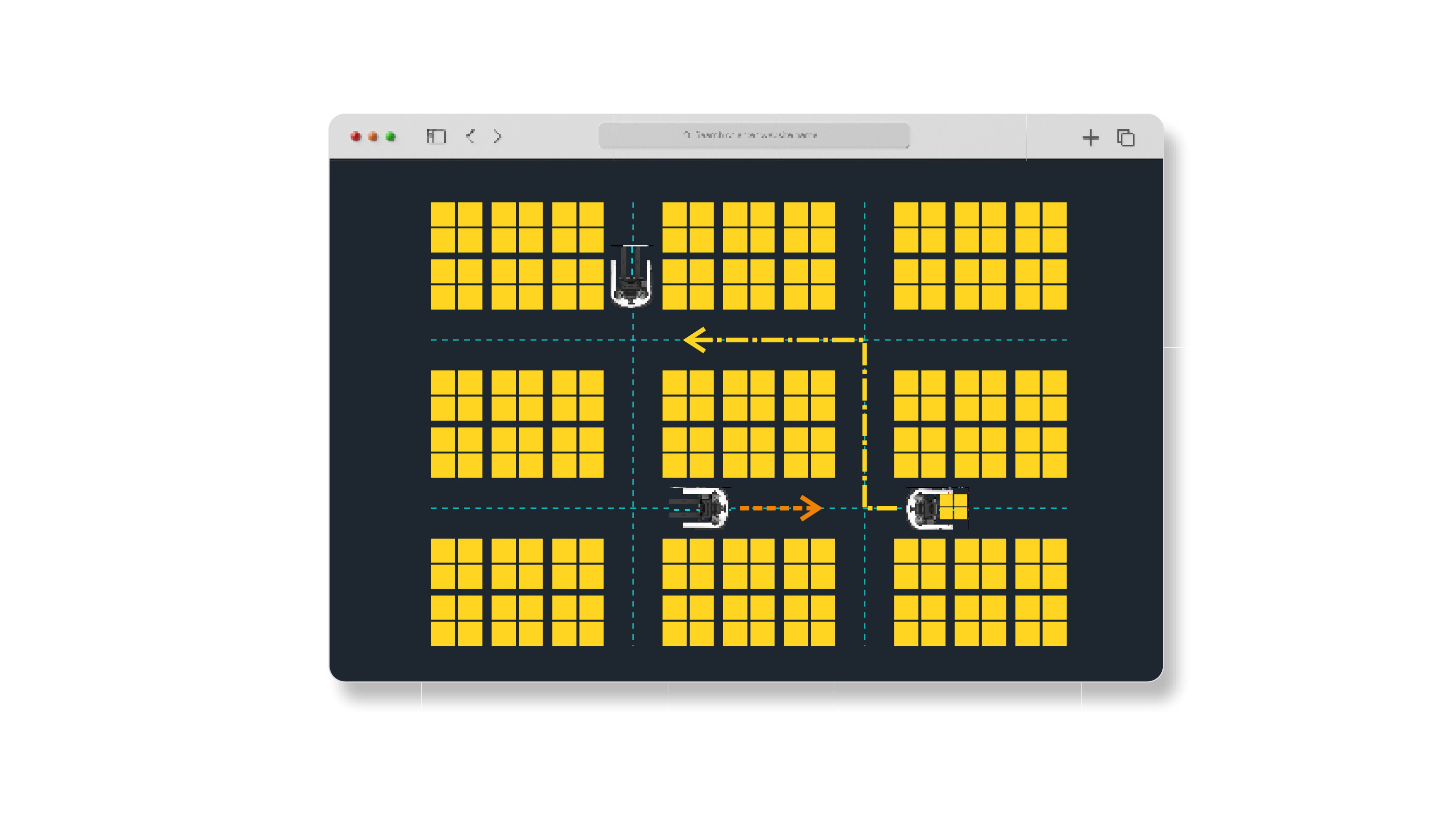
Optimale Routenplanung

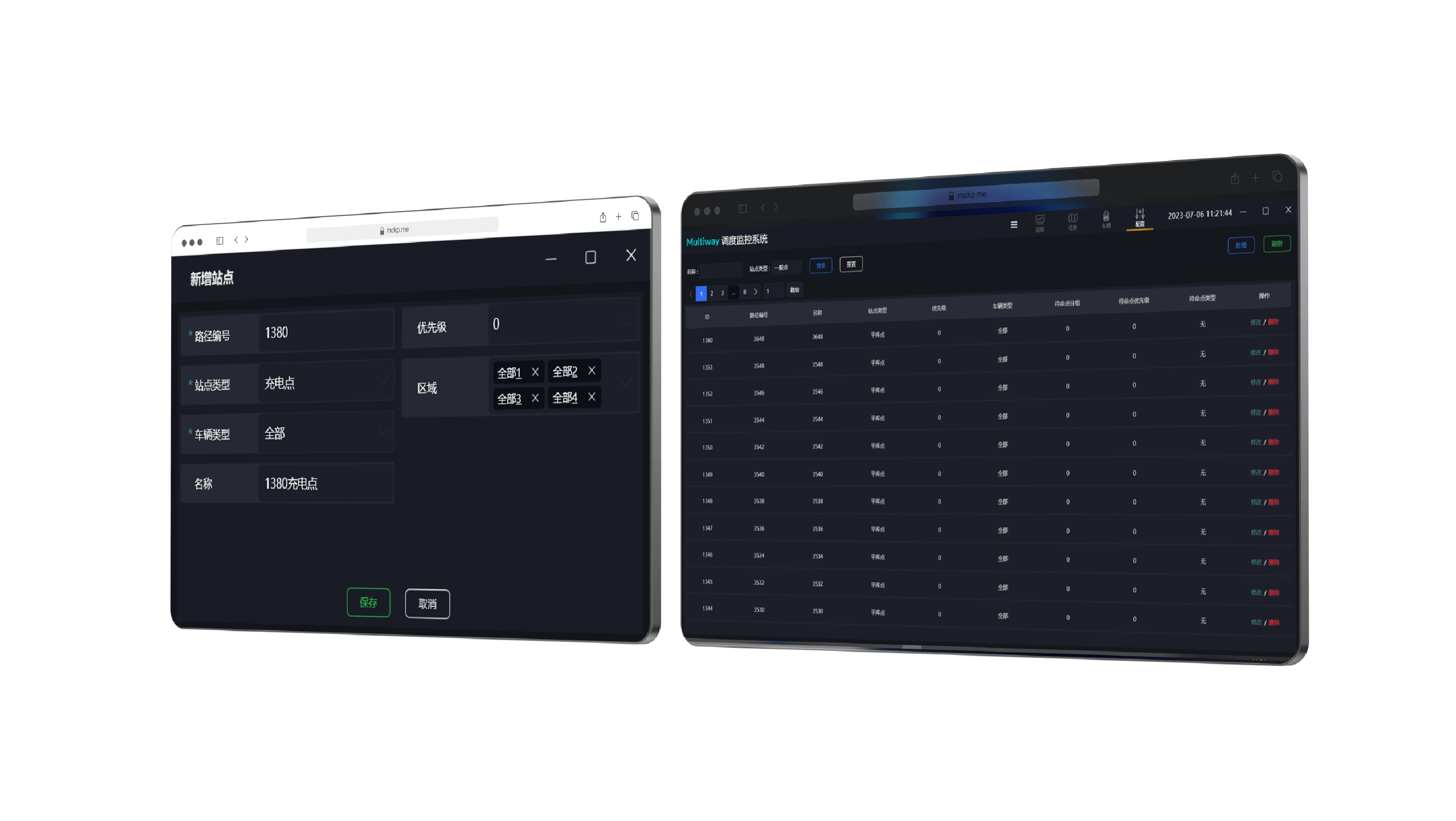
Intelligente Verkehrsregelung und Einsatzplanung

Überwachung und Verwaltung von Geräten

Fahrzeugdisposition in der Nähe

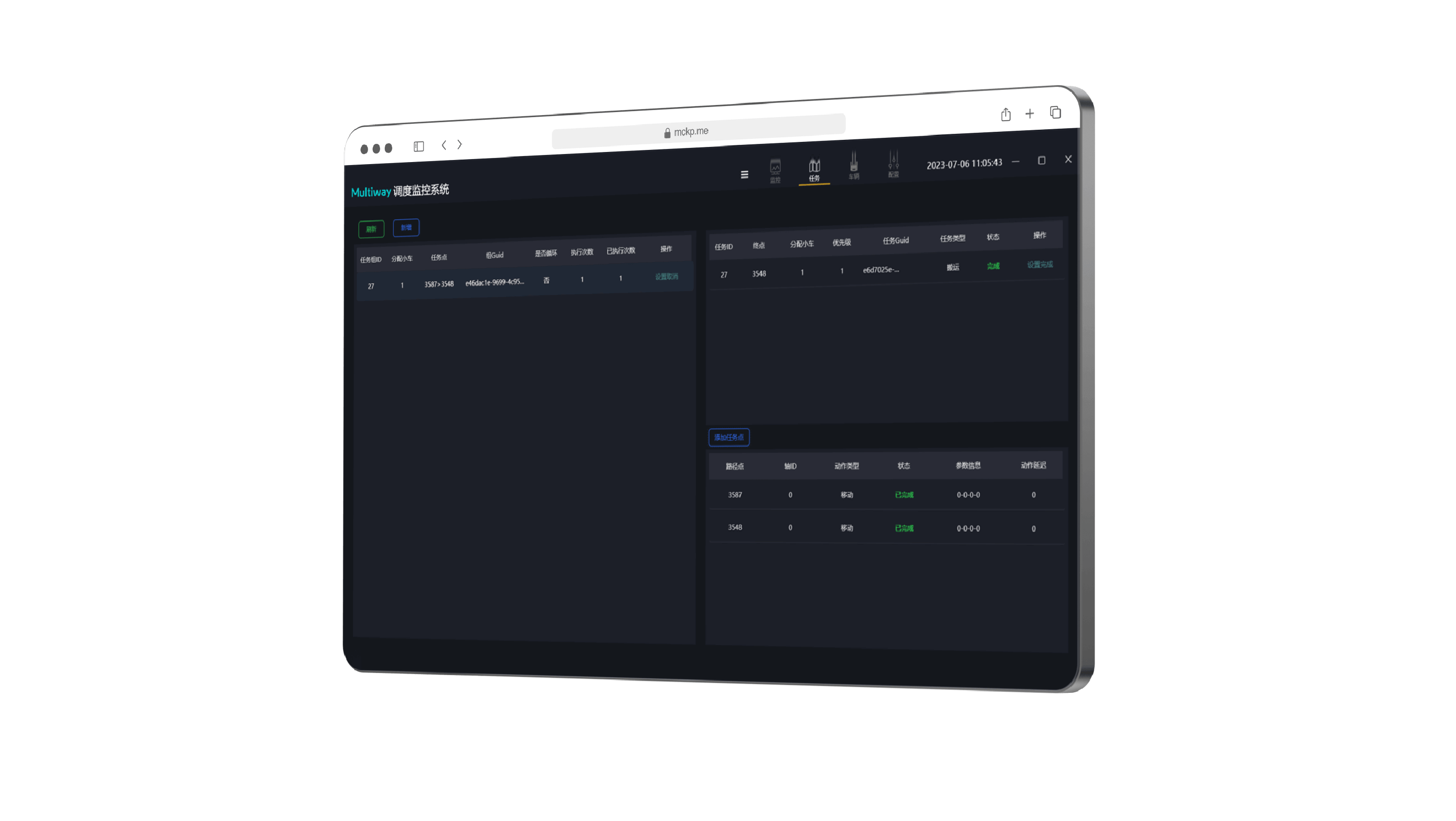
Intelligente Aufgabenverteilung
01
Dynamische Überwachung
02
Aufgabenverwaltung
03
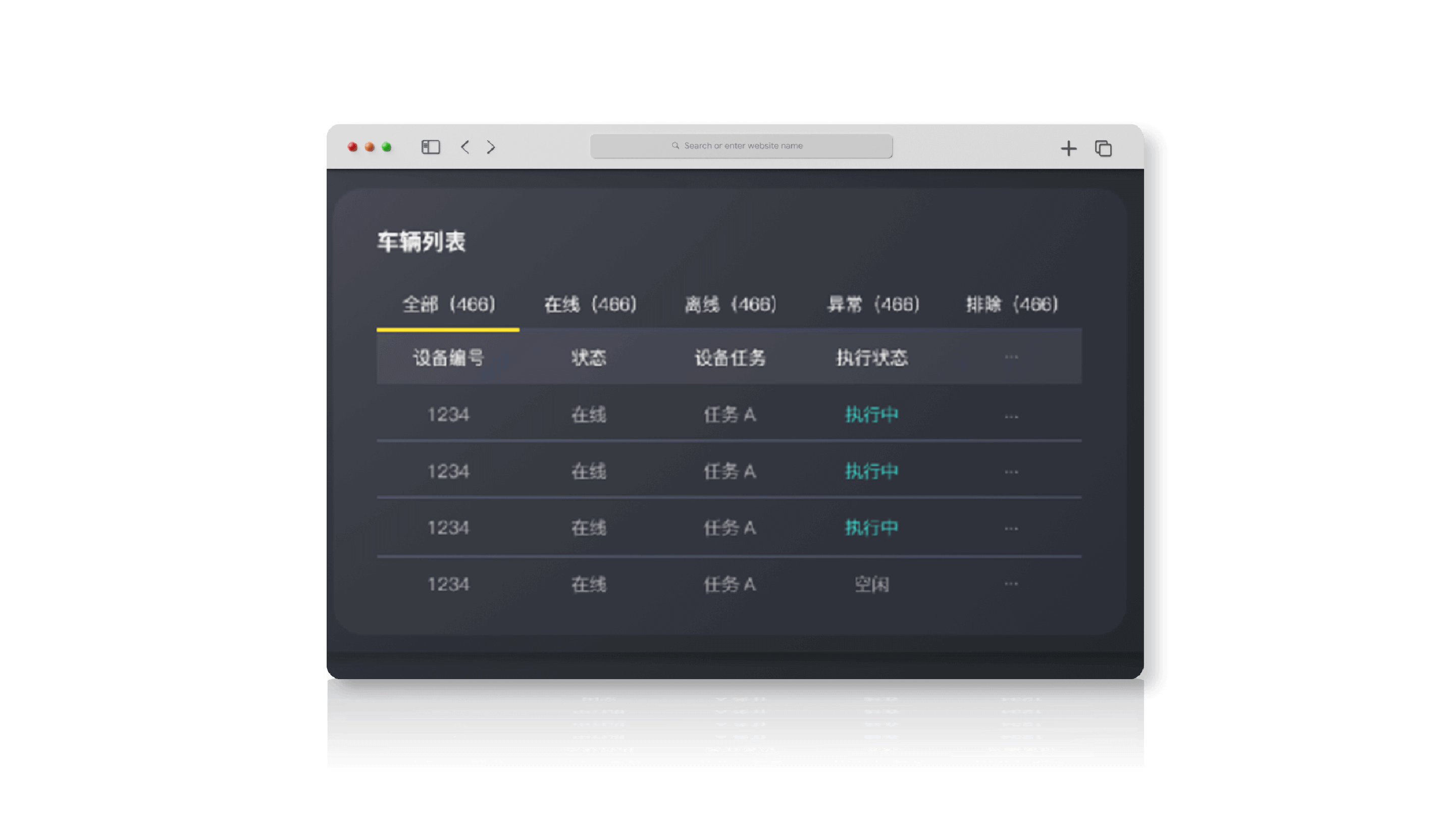
Fahrzeugverwaltung
04
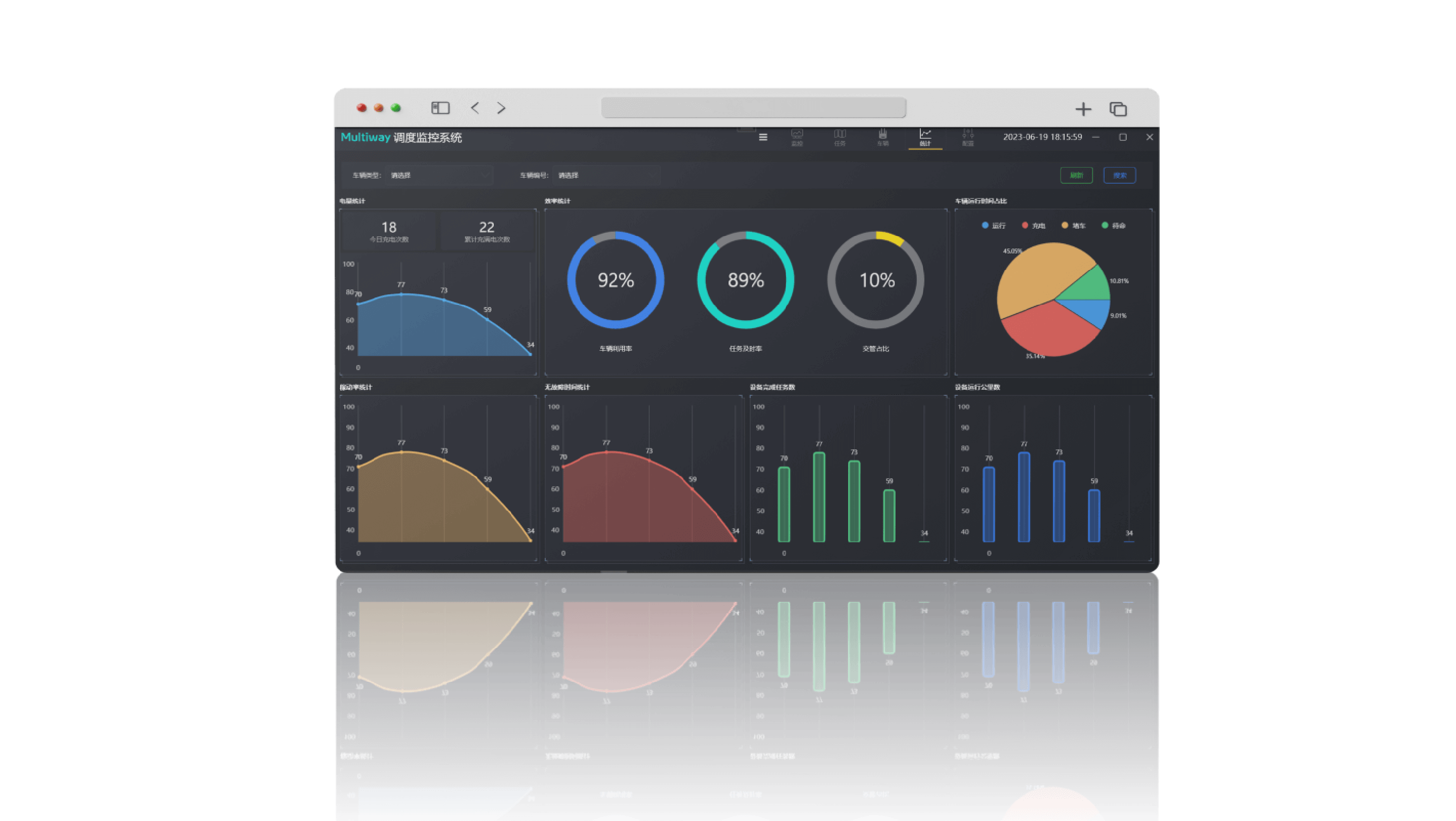
Berichte & Statistiken
05
Verkehrssteuerung
06
Geräteverwaltung
07
Systemkonfiguration


Hotline
+86-133-9286-4873
Email: sales@mw-robot.com




Nachricht

